
印网友发炒作:中国人形机器人在中印实控线巡逻!我网友乐了
有趣的是,模糊不清,拍摄者也没露脸,但这并不妨碍一些印度网友脑补出一整套“未来战士入侵喜马拉雅”的剧本。

要核实印度网友所传的真实性,需先明确核心问题:人形机器人若要在喜马拉雅地区执行巡逻任务,必须突破多重技术难关。现实中的人形机器人技术尚未成熟,即便在平坦地面移动,也可能出现失衡问题,更难以适应边境巡逻需求。

中印实控线米以上,冬季气温可降至零下40摄氏度,空气含氧量不足平原地区的50%,强风天气还会影响人员站立稳定。
这种环境下,专业边防战士需依赖供氧设备与防寒装备维持工作,当前人形机器人更难以承受此类极端条件。

据机器人研发领域工程师介绍,主流人形机器人的传感器在低温环境中动态误差会超过5厘米,远高于工业场景0.02毫米的精度标准,在结冰路面移动时失衡概率超过10%。
锂电池在低温环境下容量会缩减一半以上,实验室环境下续航两小时的机器人,在高原地区续航可能缩短至40分钟,若为机器人配备大量备用电池,将严重影响其巡逻效率,显然不切实际。
巡逻过程中,装备需耐受风沙侵蚀、强紫外线照射,同时在碎石路面保持稳定移动。
当前人形机器人的肢体技术仍存在短板,人类手部有27块骨骼与50余块肌肉协同运作,机器人“灵巧手”要达到同等操作精度,需采用高自由度设计,这必然降低设备耐用性。

目前精密触觉传感器的量产良率不足60%,制造成本居高不下,即便实现“捏取绣花针”的高精度操作,也无法承受边境巡逻的高频次使用损耗。
在移动稳定性方面,波士顿动力的Atlas机器人虽能在实验室完成跑跳动作,但进入野外复杂地形后易发生倾倒,在喜马拉雅地区的碎石坡面上更难以正常移动。

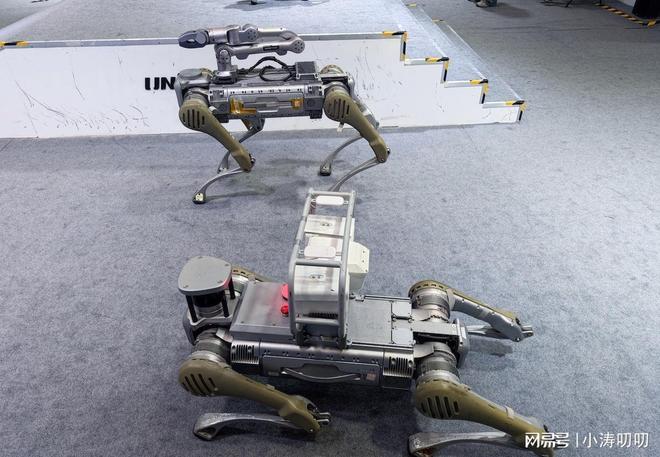
这类装备并非人形设计,而是定制化的“移动岗哨”,顶部搭载天线与传感器,具备远程通信、昼夜侦察与自主导航功能,能够适应高原恶劣环境。
2024年已有报道显示,中国在边境地区试点此类无人装备,其设计以实用为核心,未追求拟人化特征——采用轮式结构确保碎石路面平稳行驶,通过密封外壳保护核心部件,可有效抵御风沙与低温侵蚀。

中国边境装备研发始终以解决实际需求为导向,与印度网友关注“视觉效果”的认知存在本质区别。
此前印度媒体曾将中国边防的太阳能路灯误判为“导弹发射架”,将无人机描述为“隐形战机”,此次将轮式无人平台曲解为人形机器人,本质上是同类认知偏差的延续。

这种现象的产生存在双重原因:一是画面清晰度不足,为想象提供了空间;二是印度对中国科技发展既好奇又焦虑,试图通过此类话题制造舆论焦点。脱离事实的炒作,导致印度社会难以客观认识中国边防智能化建设的实际成果。
印度网友的炒作虽偏离事实,却反映出公众对机器人技术发展水平的普遍好奇:当前机器人技术是否已接近“机器换人”的阶段?

答案是,其发展水平超出普通民众的基础认知,但与科幻电影中的“未来战士”仍有显著差距,正处于从实验室走向工业应用的过渡阶段,尚未具备承担边境巡逻任务的能力。
当前,人形机器人已在特定场景实现应用。比亚迪新能源汽车工厂中,优必选Walker S机器人可在生产线公斤物料的搬运与定点投放,遇到障碍物时能自主规划绕行路线;北京部分商场内,银河通用Galbot机器人可与顾客实现语音交互,并从货架精准抓取商品。

这些机器人能够稳定运行的核心原因,在于工厂与商场具备环境稳定的共性——地面平整、温度适宜、任务单一,恰好规避了当前机器人技术的固有短板。
减速器作为人形机器人的关键部件,此前长期被国外企业垄断,如今绿的谐波、兆威电机等国内企业已实现技术攻坚,将制造成本降低三分之二;AI控制系统方面,国内研发的具身智能大模型已能支撑机器人完成折衣服、冲泡饮料等复杂动作,摆脱了传统固定指令的操作限制。
机器人研发专家孙志远指出,机器人执行指令的精准度不足,核心症结就在于真实场景数据缺失与算力支撑不够。
边境巡逻场景的突发情况发生率极高,即便专用无人平台也需后台人员远程监控,关键决策环节仍依赖人工判断,人形机器人更无法独立承担此类任务。

当前机器人技术呈现“专业领域突出,通用能力不足”的特征,在特定场景可实现高效作业,但尚不具备全场景适应能力。工信部将人形机器人纳入未来产业十大重点方向,正是基于其发展潜力的判断,但同时明确提出,相关标准制定需要跨行业、跨国界的协同合作,短期内难以形成统一规范。
综合来看,机器人技术正处于快速发展阶段,但尚未达到成熟应用水平,边境巡逻这类高难度任务暂时超出其能力范畴。
独居女生租房20天,发现灯里有摄像头,拆下发现是实时监控,视频拍的全是她;房东称“或是上一个租客所为”
新国标电动车上市被吐槽,旧车翻新成了香饽饽,消费者:我买车就想图个便利
首款LPDDR5x-8533的AI Max+ 395迷你主机,天钡NEX395上架
新世界·天馥执掌C位!广州首个滨江太古里首开在即,坐收白鹅潭价值圈层红利!





